
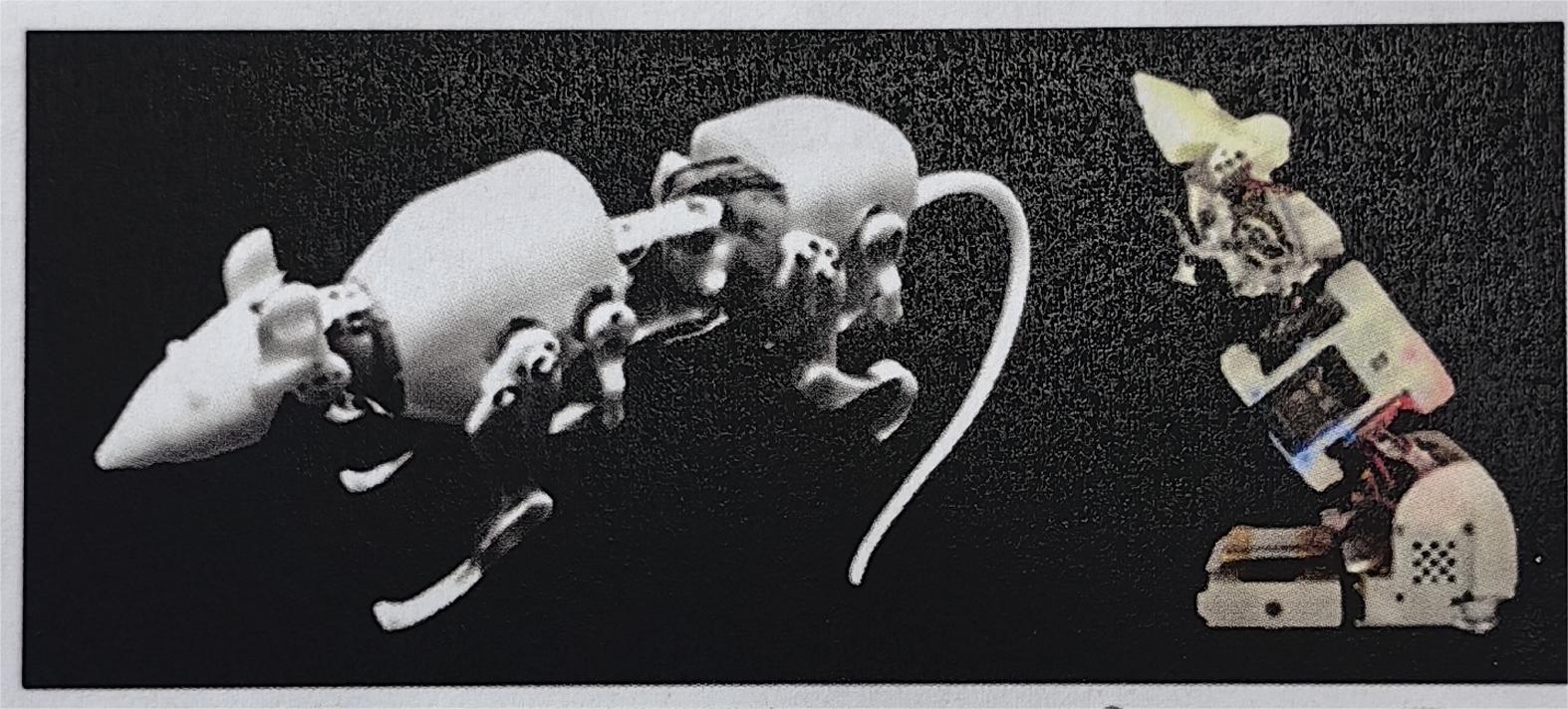
微小型仿生机器人体型小巧、机动灵活,是执行狭窄空间探测的理想机器人形态,能进入人无法到达的区域执行危险任务,在国家公共安全、国防方面具备很好的应用前景。同时,利用微小型仿生机器人复现动物行为模式,为人类探索生命规律、解决相关科学问题提供了新的技术手段和研究思路,是国际前沿热点。但是,由于受尺度限制,微小型仿生机器人仅能承载有限的硬件和计算资源,在多态运动、多传感器集成等方面存在诸多挑战。本课题组以鼠类作为仿生对象,突破了微小型仿生机器人多关节灵巧设计与系统集成关键技术,研制成功了集成度高、运动协调能力强的仿生机器鼠。
 标的编号:1
标的编号:1
 行业分类:高端装备制造
行业分类:高端装备制造
 地区:北京
地区:北京
 拟转化方式:技术转让/技术许可
拟转化方式:技术转让/技术许可
标的介绍
标的详情
标的介绍
标的详情
| 序号 | 专利名称 | 申请号/专利号 | 专利类别 | 操作 |
|---|---|---|---|---|
| 1 | 仿生机器鼠的腰部模拟装置 | CN201510570115.9 | 发明专利 |
查看详情 |
| 2 | 基于微舵机的机器鼠腿足结构 | CN201910351598.1 | 发明专利 |
查看详情 |
| 3 | 仿生机器鼠的前臂模拟装置 | CN201410389842.0 | 发明专利 |
查看详情 |
